このプログラムは
サーボモータをテストできる機能と人を見つめるロボットです。
人を見つめるロボットは従来のv1と同じ機能をします。 どのロボットなのかは、既存のv1映像で確認してみてください。
部品リスト
ロボット部品
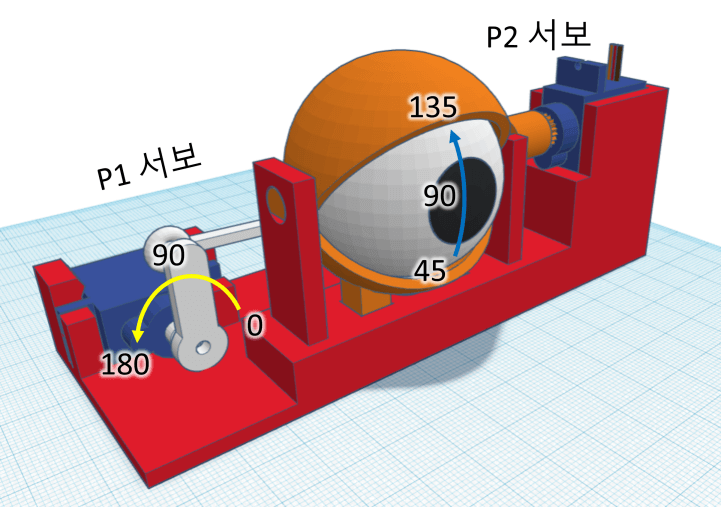
3Dプリンターでロボット部品を出力します。 眼球は白、瞳は黒、その他の部品は異なる色で出力します。
https://www.tinkercad.com/things/jQ4UeLktOko
ロボット製作
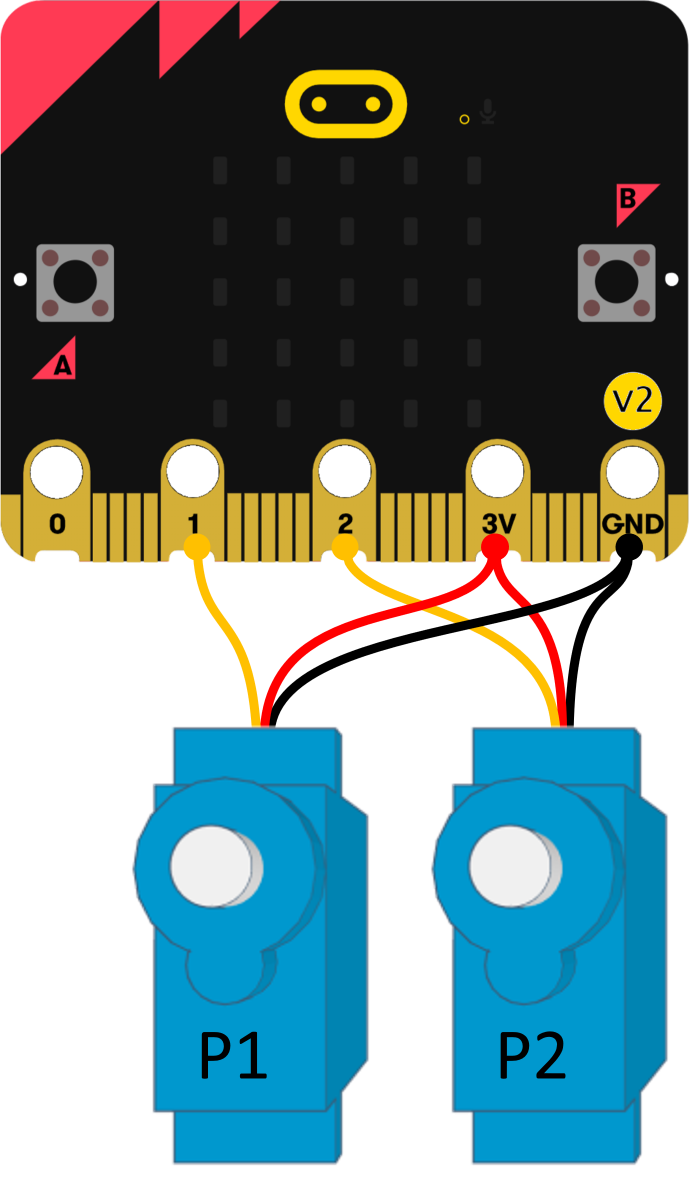
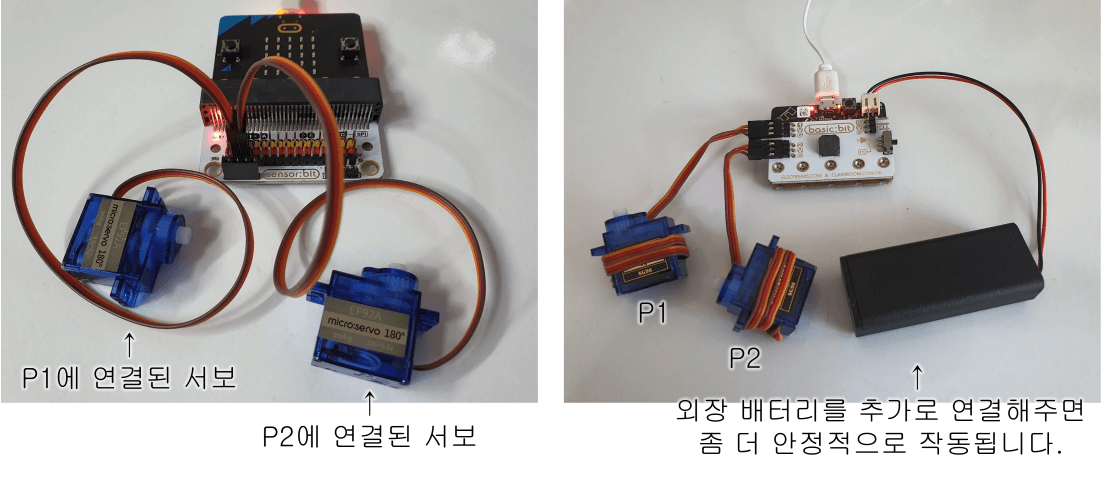
- サーボモータ1つはP1、もう一方のサーボモータはP2に接続します。
拡張ボードを使用すると便利に接続できます。
- Micro:bitとペアリングします。 そして、P1サーボとP2サーボの角度をそれぞれ90°に設定します。
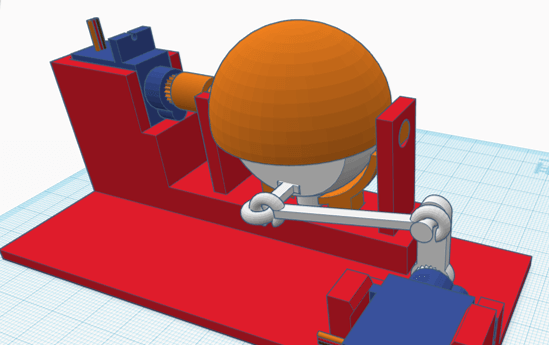
- 3Dプリンターで出力した部品でロボットを組み立てます。
- ラジオスイッチで「Eyebot」をクリックすると、ロボットが作動します。